Media Summary: Landmark Based Aggregation of swarm robots Research Video Controlling Collision-Induced Reinforcement learning with policy gradient and deep neural network to learn the local rules for a
Overview
Swarm Robot Aggregation - Detailed Analysis
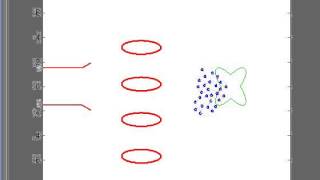
Landmark Based Aggregation of swarm robots Research Video Controlling Collision-Induced Reinforcement learning with policy gradient and deep neural network to learn the local rules for a Reinforcement Learning based aggregation of swarm robots Swarm Aggregation, Collision/Obstacle Avoidance, and Shape Formation This video describes the main ideas behind using a group mind neural network on a
Prof. Jan Wehr. College of Sciences. The University of Arizona.
Gallery
Photo Gallery












Related