Media Summary: This is the last video-lecture of the course CSE360-460 Introduction to Mobile This video explains how to use the CoppeliaSim plugin to create A Pioneer ground vehicle autonomously explores a Styrofoam environment while generating an exact
Overview
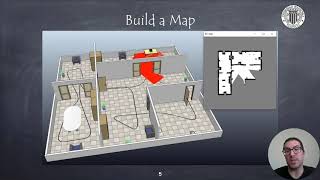
Robotic Mapping Occupancy Grid Mapping - Detailed Analysis
This is the last video-lecture of the course CSE360-460 Introduction to Mobile This video explains how to use the CoppeliaSim plugin to create A Pioneer ground vehicle autonomously explores a Styrofoam environment while generating an exact ENLACE interns Yoatzin and Ziyun implemented This video is part of the RoboJackets Software Training Program for Fall 2021. This video will describe how to implement grid-based
Robot Mapping and Exploration: Occupancy Grid Mapping with Custom Ray Casting (EECS 467 A2) Read more on the Breshenham's line algorithm here: This video explains the basics of SLAM (Simultaneous Localization and
Gallery
Photo Gallery











Related







