Persistent Multi Robot Mapping In An Uncertain Environment - Detailed Analysis
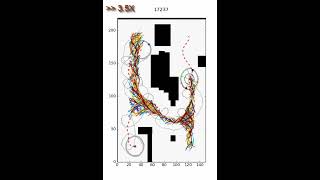
ICRA 2018 Spotlight Video Interactive Session Wed PM Pod K.7 Authors: Talebpour, Zeynab; Martinoli, Alcherio Title: Published by IEEE Transactions on Vehicular Technology, 2020 Autonomous ... ANTS/SWARM 2026 paper We study the problem of deploying R mobile Multi-Robot Persistent Monitoring Experiment Paper available at: arxiv.org/abs/2404.07880 Abstract: ADRPP solves multi-robot planning problem in an office corridor environment.
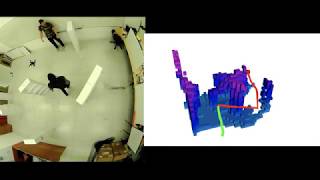
This video is a demonstration of the results published in the paper: “Autonomous Video demonstration of laboratory based testing of Target Search and Cost-Optimal Navigation in Unknown Environments for Multi-Robot Systems Video for the IEEE Transactions on Industrial Electronics paper 'Voxel-Based Localization and The video accompanies our ICRA 2019 paper.
Photo Gallery