Media Summary: This project discusses a real-time implementation of a hierarchical This is just a simulation of mobile robot UC Berkeley Fall2017 ME C231A Final Project Taohan Wang, Jiayang Cao, Anke Zhang, Moyu Li, Ming-Hsueh Wu, Jialong Ren.
Overview
Vehicle Path Tracking Using Model Predictive Control - Detailed Analysis
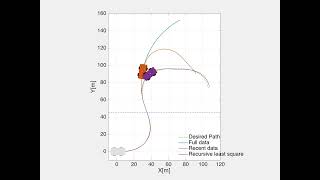
This project discusses a real-time implementation of a hierarchical This is just a simulation of mobile robot UC Berkeley Fall2017 ME C231A Final Project Taohan Wang, Jiayang Cao, Anke Zhang, Moyu Li, Ming-Hsueh Wu, Jialong Ren. This video is supplemental material to our paper submitted to IV 2023: " This is a demo video for our paper submitted to 2021 IDETC. For more details, please refer to the paper: Lichuan Ren, Zhimin Xi. Model Predictive Path Integral Control For Car Driving With Dynamic Cost Map
Path tracking control with friction estimation Model predictive control autonomous car following track This work is the implementation of the paper, Presented paper can be downloaded here: ...
Gallery
Photo Gallery











Related




![Model predictive control for obstacle avoidance for autonomous ground vehicles [1/2]](https://i.ytimg.com/vi/RcY41FFBqOc/mqdefault.jpg)
