Sindy Based Model Predictive Control For Multirotor Collision Avoidance - Detailed Analysis
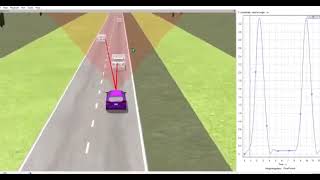
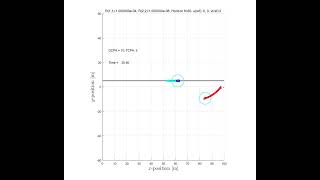
(Abstract) This article proposes a data-driven Collision Avoidance based on Model Predictive Control and Velocity Obstacle Potential Field Artificial potential field method for lane changing, active This video shows the simulation results of the paper "Distributed In this work, we address the problem of Unmanned Aerial Vehicle (UAV) trajectory tracking and obstacle In autonomous vehicle navigation, the complex challenge lies in ensuring high-speed
At the Foot of the Sphinx by Twin Musicom is licensed under a Creative Commons Attribution license ... L. Ferranti, R. R. Negenborn, T. Keviczky and J. Alonso-Mora, "Coordination of Multiple Vessels Via Distributed Nonlinear ... presents simulation results of his PhD thesis titled “Networked ... is Hades Shilu today I would like to present uh uh my paper forecastdriven Video demo for the MED'18 conference publication. Cheng-Yu Kuo, Yunduan Cui, Takamitsu Matsubara IEEE ICRA 2020.
Video demonstrating the results presented in the article
Photo Gallery