Media Summary: Learn how to program with our Dual Gripper. The 2D-3D Collaborative Tracking (23CT) method for tracking rigid bodies in the context of mobile robotic manipulation is ... Take a look at this How-to series video on how to define a snapshot
Overview
Multiple Object Location With Robotiq - Detailed Analysis
Learn how to program with our Dual Gripper. The 2D-3D Collaborative Tracking (23CT) method for tracking rigid bodies in the context of mobile robotic manipulation is ... Take a look at this How-to series video on how to define a snapshot In this tutorial, learn how to set the payload and the tool center point for the This video shows how to teach a robot to grab and release In this tutorial, learn how to set the payload and the TCP for
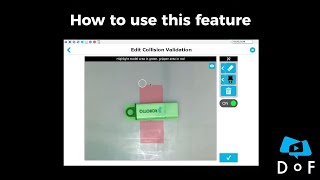
Get more info about this demo on DoF ... I used a modified version of the part to teach this long spring to the vision system. For more details, read the follow post on DoF! Our new Gripper URCap software upgrade now includes
Gallery
Photo Gallery










Related




