Media Summary: Point stabilisation Model Predictive Control with Point stabilisation Model Predictive Control with one Trajectory tracking Model Predictive Control with
Overview
Matlab Simulation Mpc With Multiple Moving Obstacle - Detailed Analysis
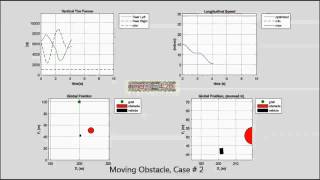
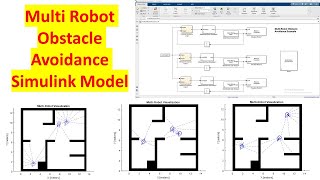
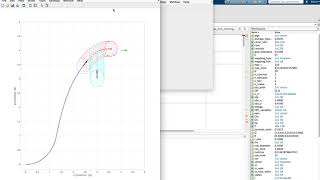
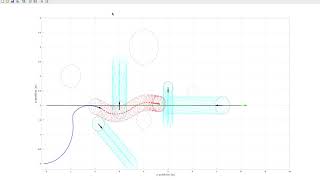
Point stabilisation Model Predictive Control with Point stabilisation Model Predictive Control with one Trajectory tracking Model Predictive Control with MPC with Velocity Obstacle for Dynamic Obstacles Trajectory tracking Model Predictive Control considering Trajectory planner (3 x static obstacle) at 1 m/s - Matlab simulation
Accompanies the paper J. Johnson and K. Hauser. Optimal Acceleration-Bounded Trajectory Planning in Dynamic Environments ... Nonlinear Model Predictive Control for Real-Time Optimal Path Tracking & Collision avoidance with moving obstacles using MIQP MPC Simulation for Multiple Autonomous Vehicles
Gallery
Photo Gallery










Related