Media Summary: This video highligths the resulting behavior of the C- Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) In this video, we present a novel, end-to-end solution for
Overview
Implicit Coordination In Crowded Multi Agent Navigation - Detailed Analysis
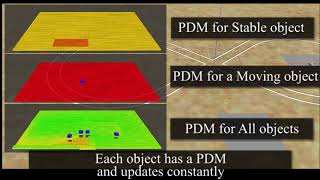
This video highligths the resulting behavior of the C- Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) In this video, we present a novel, end-to-end solution for Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Circle Scene) This is a video recording of the seminar “The ICCV 2023 - Multi-Object Navigation with dynamically learned neural implicit representations
Paper submitted to the MED 2026. Abstract: Distributed control schemes are essential for scalable Distributed Coordination of Multi-Agent Systems
Gallery
Photo Gallery











Related