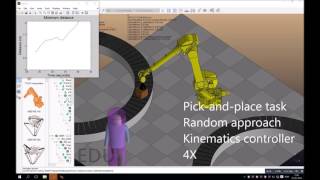
Media Summary: CollisionIK: A Per-Instant Pose Optimization Method for Generating The system can detect human presence in the working area, slow down the To navigation on the complex environment, the Deep Reinforcement Learning can be attractive method better than classical ...
Overview
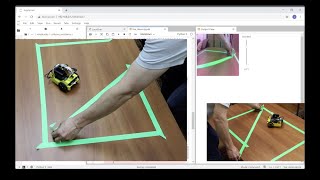
How To Program Collision Avoidance For Your Robot - Detailed Analysis
CollisionIK: A Per-Instant Pose Optimization Method for Generating The system can detect human presence in the working area, slow down the To navigation on the complex environment, the Deep Reinforcement Learning can be attractive method better than classical ... More information available at: www.ros.org/wiki/multi_robot_collision_avoidance. Reach Control improves the effectiveness, accuracy and control of Reach System manipulators. It packages an intuitive HMI with ...
Gallery
Photo Gallery











Related