Media Summary: A talk by Kunpeng Yao, a lecturer in the School of Computer Science, at the University of Leeds, hosted by Leeds Institute for Data ... This video shows the integration of LLMs to This paper addresses the problem of jointly
Overview
Grasp Planning To Maximize Task Coverage - Detailed Analysis
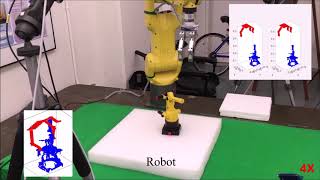
A talk by Kunpeng Yao, a lecturer in the School of Computer Science, at the University of Leeds, hosted by Leeds Institute for Data ... This video shows the integration of LLMs to This paper addresses the problem of jointly For CS498IR: AI for Robotic Manipulation Spring 2021, University of Illinois at Urbana-Champaign Instructor: Kris Hauser ... High-speed motions in pick-and-place operations are critical to making robots cost-effective in many automation scenarios, from ... This demo video summaries the experimental results of our proposed
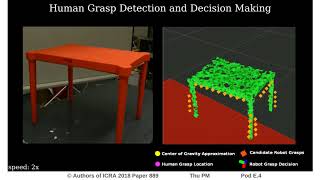
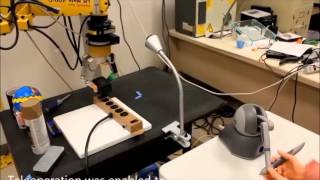
ICRA 2018 Spotlight Video Interactive Session Thu PM Pod E.4 Authors: Tariq, Usama; Muthusamy, Rajkumar; Kyrki, Ville Title: ... Demonstration of the iterative PPO-JPO algorithm to solve the
Gallery
Photo Gallery











Related