Geometric Methods For Multi Agent Collision Avoidance - Detailed Analysis
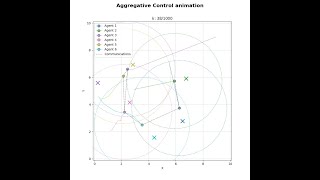
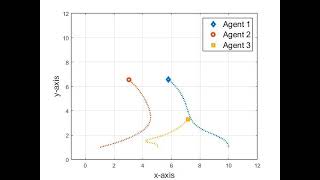
Python Implementation of Reciprocal Velocity Obstacle (RVO) for Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Circle Scene) This video demonstrates our research work introduced in the following paper: Neelotpal Dutta, Tianyu Zhang, Tao Liu, Yongxue ... Barrier functions for multi-agent ellipsoid collision avoidance This video illustrates five planar quadrotors (quadrotor confined to the 2D plane) animation of Aggregative Optimization for Multi-agent Systems without collision avoidance
Reciprocal Velocity Objects - Multi Agent Collision Avoidance Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) Paper: GitHub: This video overviews our ... Animation of Aggregative Optimization for Multi-agent systems with collision avoidance
Photo Gallery