Media Summary: In this video, we explore the fascinating world of [CVPR2026] Event6D: Event-based Novel Object 6D Pose Tracking Seokeon Choi, Junhyun Lee, Yunsung Lee, and Alexander Hauptmann, "Robust
Overview
Event Based Long Term Object Tracking Long Version - Detailed Analysis
In this video, we explore the fascinating world of [CVPR2026] Event6D: Event-based Novel Object 6D Pose Tracking Seokeon Choi, Junhyun Lee, Yunsung Lee, and Alexander Hauptmann, "Robust I will present the main algorithms to achieve robust, 6-DOF, state estimation for mobile robots using passive sensing. This is a video of the experiment in a night scenario. A local sliding window tracker combined with a global sliding window detector provides a
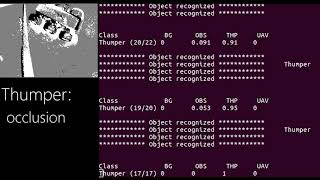
The video shows the simulation and experimental results for
Gallery
Photo Gallery



![[CVPR2026] Event6D: Event-based Novel Object 6D Pose Tracking](https://i.ytimg.com/vi/EVSg7dcL5Zs/mqdefault.jpg)

![[ECCV 2020 Workshop] Long-term Object Tracking (RLT-DiMP) [full ver.]](https://i.ytimg.com/vi/dm3_CwkEy3M/mqdefault.jpg)




Related


