Data Driven Approaches For Better Motion Control - Detailed Analysis
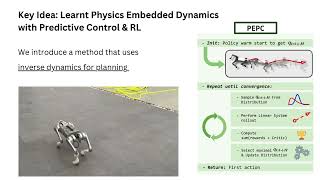
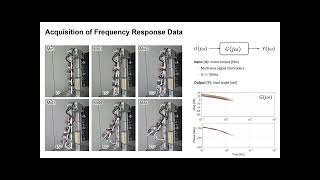
Presented by Cong Wang at SBRS 2014. The Stanford-Berkeley Robotics Symposium brought together roboticists from Stanford, ... Active learning of robot dynamical systems using information maximization of Koopman operators. Paper submitted. Work by Ian ... PEPC: Data-Driven Physics Embedded Dynamics for Predictive Control and Reinforcement Learning Madhur Behl (PhD, University of Pennsylvania) Frequency Response Data-driven Optimization for Fast and Precise Motion Control of Flexible Joint This paper presents a comprehensive review of learning-based
Imagine a robot chef that understands complex dynamics like a pro, cuts your veggies flawlessly, and even handles broken ... Ludovic Righetti - Model-based and data-driven approaches for the control of contact interactions Visit my Vgen for a limited 10% OFF Custom Art Commission! Hi everyone! Thank you for your ... Based on paper in CCTA 2022: Synthesizing Safety Controllers for Uncertain Linear Systems: A Direct Learn how to replace brittle, logic-heavy gameplay code with a clean,
Photo Gallery