Media Summary: RRT* Path Planning and nav - Test 1 (increase expansion dist) Motion planning with a humanoid. Based on a VDEngineering ~~My Udemy Courses on Motion Planning / Navigation / Trajectory Planning: ...
Overview
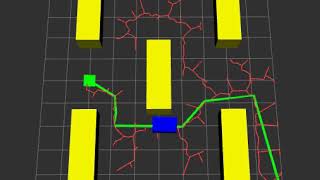
Rrt Implementation Test1 - Detailed Analysis
RRT* Path Planning and nav - Test 1 (increase expansion dist) Motion planning with a humanoid. Based on a VDEngineering ~~My Udemy Courses on Motion Planning / Navigation / Trajectory Planning: ... See the other videos in this series: This video ... ROS Web İnterface Course Map Zoom and Mapping Full Course: ... This is a new map exploration strategy for directing the robot towards unexplored space. The strategy is based on ...
Python simulation of single and bidirectional Rapidly-exploring Random Tree (
Gallery
Photo Gallery








![Motion Planning Algorithms (RRT, RRT*, PRM) - [MIT 6.881 Final Project]](https://i.ytimg.com/vi/gP6MRe_IHFo/mqdefault.jpg)


Related







